La flottille de sonde lunaire
Au début de 1967, le mission N1-L3 était devenu un plan très complexe nécessitant des missions de soutien, la plupart conçues pour compenser les faibles capacités du complexe L3. La première mission d'atterrissage lunaire serait précédée du lancement de deux orbiteurs lunaires de robots Ye-8LS, qui prendrait des photographies détaillées à haute résolution des sites d'atterrissage proposés. Les photographies permettraient aux scientifiques de sélectionner deux sites d'atterrissage : un principal et un de réserve. Une fois les sites d'atterrissage déterminés, les Soviétiques lanceraient deux rovers Ye-8 séparés à moins d'une semaine l'un de l'autre avec des boosters UR-500K-Bloc D de Tyura-Tam. Les rovers atterriraient sur les sites de débarquement principaux et de réserve, respectivement, en s'assurant que les zones spécifiques d'atterrissage ne présenteraient pas de dangers pour le vol piloté.
Un mois ou deux plus tard, le N1 serait lancé avec un complexe L3 sans cosmonaute, ce dernier comprenant un orbiteur LOK et le vaisseau lunaire de réserve (LKR) - Le LKR atterrirait automatiquement sur le site du rover Ye-8 de réserve en utilisant des balises radio pour le guider avec précision, économisant ainsi la précieuse réserve de propulseur de l'atterrisseur. Le LOK automatisé photographierait le site d'atterrissage depuis l'orbite lunaire et reviendrait sur terre. Le rover Ye-8 ferait ensuite une reconnaissance autour du LKR, prenant des photos et retransmettant des images télévisées, s'assurant ainsi qu'il n'y avait pas eu de dommages lors de l'atterrissage. Ce n'est qu'après une analyse montrant que le LKR était effectivement en état de fonctionnement que les préparatifs commenceraient pour le lancement du complexe L3 avec l'atterrissage piloté. Le deuxième N1-L3 effectuerait son vol selon le profil de mission classique, le mécanicien de bord restant en orbite dans le LOK et le commandant atterrissant sur la Lune dans le LK. L'atterrissage proprement dit serait effectué en utilisant des radiobalises des rovers Ye-8 à la surface de la Lune. L'atterrissage devait avoir lieu aussi près que possible du LKR. Les rovers examineraient à nouveau le LK principal pour vérifier si le lanceur était en bon état extérieur pour le décollage. Si aucun dommage n’avait été subis, le cosmonaute serait autorisé à débarquer et à marcher sur la surface de la Lune. Une EVA nominale durerait environ deux heures, tandis que le séjour total sur la Lune serait limité à six heures. Si le LK principal était endommagé, le cosmonaute devrait se rendre dans le LKR et décoller avec ce vaisseau. Si le LK et le LKR étaient trop éloignés, le rover Ye-8 pourrait servir de véhicule de transport.
Lorsque la mission Voskhod 3 a été reportée, le Parti communiste s’est retrouvé sans mission spatiale spectaculaire pour célébrer le 23e Congrès du Parti communiste à Moscou en mars 1966. Babakin proposa de lancer un modeste satellite sur la Lune. La sonde Ye-6S avait été conçue, développée et construite en moins de trente jours et lancée le 1er mars. Une panne du système de guidage de l'étage Bloc L a empêché l'achèvement de la mission, mais une sonde identique a été lancée un mois plus tard le 31 mars et nommée Luna 10. Le 3 avril, Luna 10 est devenu le premier satellite artificiel de la Lune.

Lancement de Luna-9 le 31 janvier 1966
La question de l’atterrissage lunaire avait provoqué de nombreuses questions sur les conditions d’atterrissage et le sol lunaire. La nécessité de cartographier le site d’atterrissage et la surface lunaire, et de renforcer les communications orbitales lunaires ont contraint les ingénieurs à envoyer de nombreuses sondes d’exploration vers la lune. L’atterrissage était inextricablement lié au développement d’un programme de sondes lunaires robotiques. Ce dernier avait commencé au début de 1958, lorsque Korolev avait proposé une série de sondes, le Ye-1, Ye-2, Ye-3 et Ye-4- pour l'exploration de la Lune. Sur les neuf lancements de la première génération de sondes, seuls trois avaient réussi un minimum, marquant quelques-unes des premières les plus importantes dans le début de la « course à l'espace ».
Fin 1965, Korolev avait transféré au bureau d'études Lavochkin la responsabilité du programme des sondes spatiales. L'ingénieur Georgi Babakin, qui dirigeait le bureau, a apporté deux modifications à la sonde rebaptisée à cette occasion Ye-6m : les airbags qui amortissaient le choc à l'atterrissage, étaient désormais gonflés après la séquence de freinage et une nouvelle version du système de
guidage avait été mise au point. La première tentative de lancement a été un succès. La sonde Luna 9 lancée le 31 janvier 1966 s’est posée en douceur le 3 février 1966 à 18 h 44 min 52 s et a envoyé les premières images panoramiques du sol lunaire. Les Soviétiques battaient ainsi une fois de plus les Américains qui ne sont parvenu à poser Surveyor 1 que le 2 juin 1966 à la première tentative après avoir été longtemps retardés par les déboires du lanceur Centaur. La sonde soviétique est parvenue à réaliser et à transmettre quatre panoramas avant que sa batterie, source unique d'énergie, ne s'épuise. Un deuxième atterrisseur du même modèle, Luna 10, a été lancé le 21 décembre 1966 et est parvenue également à se poser en douceur.


Georgi Babakin
Fin 1966, lorsque Luna 9 s’est posée sur la Lune, les ingénieurs du département de Mikhail K. Tikhonravov à l'OKB-1 travaillaient déjà depuis six ans à concevoir et à créer une station de recherche mobile pour parcourir la surface de la Lune. Contrairement aux précédentes sondes lunaires Ye-6, qui avaient été lancées par le booster 8K78 à quatre étages, les nouvelles sondes plus lourdes seraient lancées par une variante du booster N1. L'étude a progressé lentement jusqu'en 1963. A ce moment, Korolev a décidé de confier le développement du châssis du futur astromobile au bureau d'étude de l'entreprise VNII Transmash de Leningrad spécialisée dans la fabrication des chars d'assaut pour l'Armée rouge et dirigée par Alexandre Leonovitch Kemurdzhian. Ce dernier avait développé une passion pour la conception d'engins spatiaux télécommandés. Les recherches menées conjointement en 1963 et 1964 par les équipes de Kemurdzhian et Korolev ont débouché sur la conception d'un véhicule de 900 kg dont la finalité était d'apporter un soutien au programme lunaire habité placé également sous la responsabilité de Korolev. Le projet lunaire habité était officiellement lancé en août 1964 et le rôle du véhicule a été précisé : celui-ci devait effectuer des opérations de reconnaissance pour préparer le débarquement des cosmonautes sur le sol lunaire. Le projet, qui disposait désormais de moyens financiers, a progressé rapidement et les ingénieurs de l'OKB-1 ont élaboré une première esquisse début 1965. Mais Korolev a décidé à la même époque de transférer l'ensemble de l'activité d'exploration du système solaire par les sondes automatiques à l'entreprise Lavochkin dirigée à l'époque par Georgi Babakin.
Babakin et Kemurdzhian sont repartis de zéro sur la conception du rover, ce changement était dicté par le changement de lanceur et le choix du booster UR-500K de Chelomey à la fin de 1965. Tout comme le projet circumlunaire L1, ce dernier utiliserait l'étage d'injection
translunaire Bloc D pour propulser le rover vers la Lune. Babakin a terminé et signé le projet de plan du Ye-8 à l'automne de 1966. L'un des principaux concepteurs de cette première sonde mobile sur la Lune était Oleg G. Ivanovskiy, un vétéran de l'époque Korolev. Il avait été le "concepteur principal" du vaisseau spatial Vostok et des premières sondes lunaires jusqu'en juin 1961, date à laquelle il avait quitté l'ingénierie pour devenir chef du département spatial à la Commission militaro-industrielle. Le 1er novembre 1965, il était revenu à la conception en tant que concepteur en chef adjoint responsable des sondes lunaires au bureau d'études de Lavochkin.
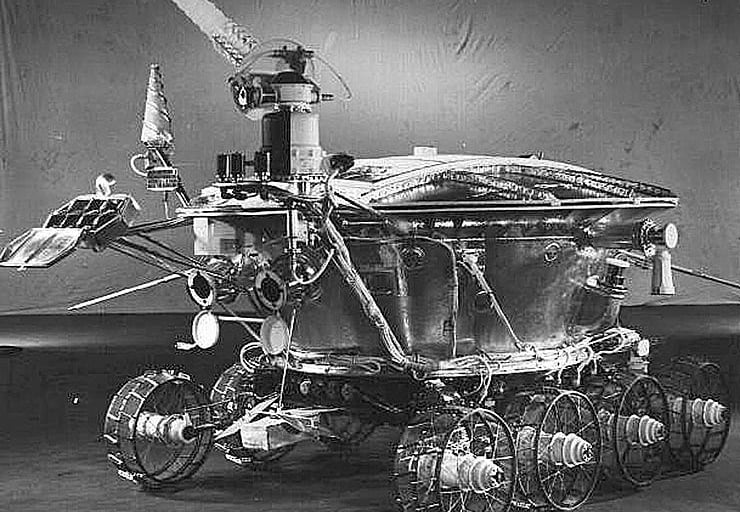
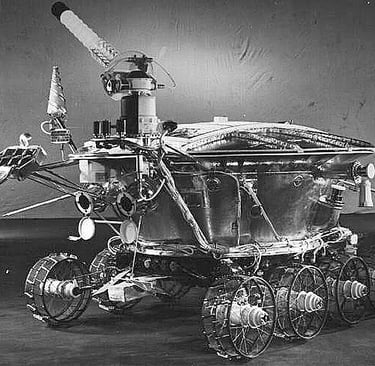
Le Rover 8Ye, appelé Lunokhod
Le véhicule Ye-8 complet avait une masse d'environ 5,700 kilogrammes et se composait d'un étage d'atterrissage (le KT) et du rover (le 8Ye). Ce dernier avait été conçu pour fonctionner pendant trois mois sur la surface lunaire.
Le cœur de l'étage de descente et de croisière était constitué de quatre réservoirs sphériques reliés entre eux par des sections cylindriques. A chaque réservoir était fixé un pied doté d'un système d'amortissement. L'ensemble formait un carré de 4 mètres de côté. Ces réservoirs contenaient les ergols qui alimentaient un moteur-fusée unique, placé au centre du carré et utilisé à la fois pour les corrections de trajectoire durant le transit entre la Terre et la Lune, pour l'insertion en orbite lunaire et pour la descente sur le sol de la Lune. Le moteur KDTU-417, qui était un nouveau moteur développé pour la sonde par le bureau d'études Isayev, avait une poussée qui pouvait être modulée entre 7,4 et 18,8 Knewtons. Le rover, appelé Lunokhod, était amarré au sommet de l'étage : quatre rampes stockées en position repliées étaient fixées sur l'étage par paires, devant et derrière lui, de manière à lui permettre de descendre sur le sol. Les rampes utilisées dépendaient de la configuration de la zone d'atterrissage. Le Lunokhod était constitué d'une structure pressurisée en forme de marmite en alliage de magnésium qui contenait l'avionique, les batteries ainsi que l'électronique associée aux
instruments scientifiques. Cette structure était posée sur un châssis comportant huit roues de 51 cm de diamètre. Un couvercle concave, qui s'ouvrait et se fermait, était placé au sommet et servait de support aux cellules d'un panneau solaire. Les senseurs des instruments scientifiques, les caméras de télévision utilisées pour la navigation ainsi que les antennes de télécommunications étaient fixées sur le dessus et sur les côtés de la structure principale. L'ensemble était haut de 1,35 m, long de 1,7 m (2,22 m au niveau des roues) et large de 2,15 m au niveau du couvercle. Le rayon de braquage minimal était de 80 cm. L'engin pouvait franchir un obstacle haut de 40 cm ou large de 60 cm, grimper une pente de 20 % et manœuvrer sur une pente de 45 %. Des systèmes de sécurité interdisaient le déplacement sur une pente supérieure à cette limite. Lunokhod 1 pouvait atteindre la vitesse de 800 m par heure en marche avant ou arrière tandis que les opérateurs de Lunokhod 2 pouvaient choisir entre deux vitesses - 800 ou 2 000 m/h - dans les deux directions. L'énergie était fournie par des cellules solaires en silicium (arséniure de gallium pour Lunokhod 2) fixées sur la face interne du couvercle, fournissant 1 kW. La température de la partie pressurisée était maintenue dans une fourchette acceptable par circulation de l'air interne complétée par un circuit de régulation thermique ouvert à eau. Des radiateurs étaient situés sur la partie supérieure de la structure pressurisée qui était recouverte durant la longue nuit lunaire par le couvercle en position repliée. Pour les télécommunications, le véhicule disposait d'une antenne orientable et d'une antenne omnidirectionnelle. Pour le diriger, une équipe de cinq opérateurs sur Terre utilisait les images fournies par les caméras de télévision pour envoyer des commandes. L'aller-retour du signal entre la Lune et la Terre prenait environ 5 secondes. Les caméras panoramiques étaient montées de chaque côté pour fournir une image panoramique sur 180° d'avant en arrière et l'autre une image panoramique sur 180° du sol au ciel.